Egocentric data collection is the most scalable path to large-scale dexterous manipulation datasets. MANUS gloves capture the full 25 DoF hand pose in first-person, with no occlusion and no drift, giving foundation models the dense, precisely labeled data they need to generalize across robotic embodiments.
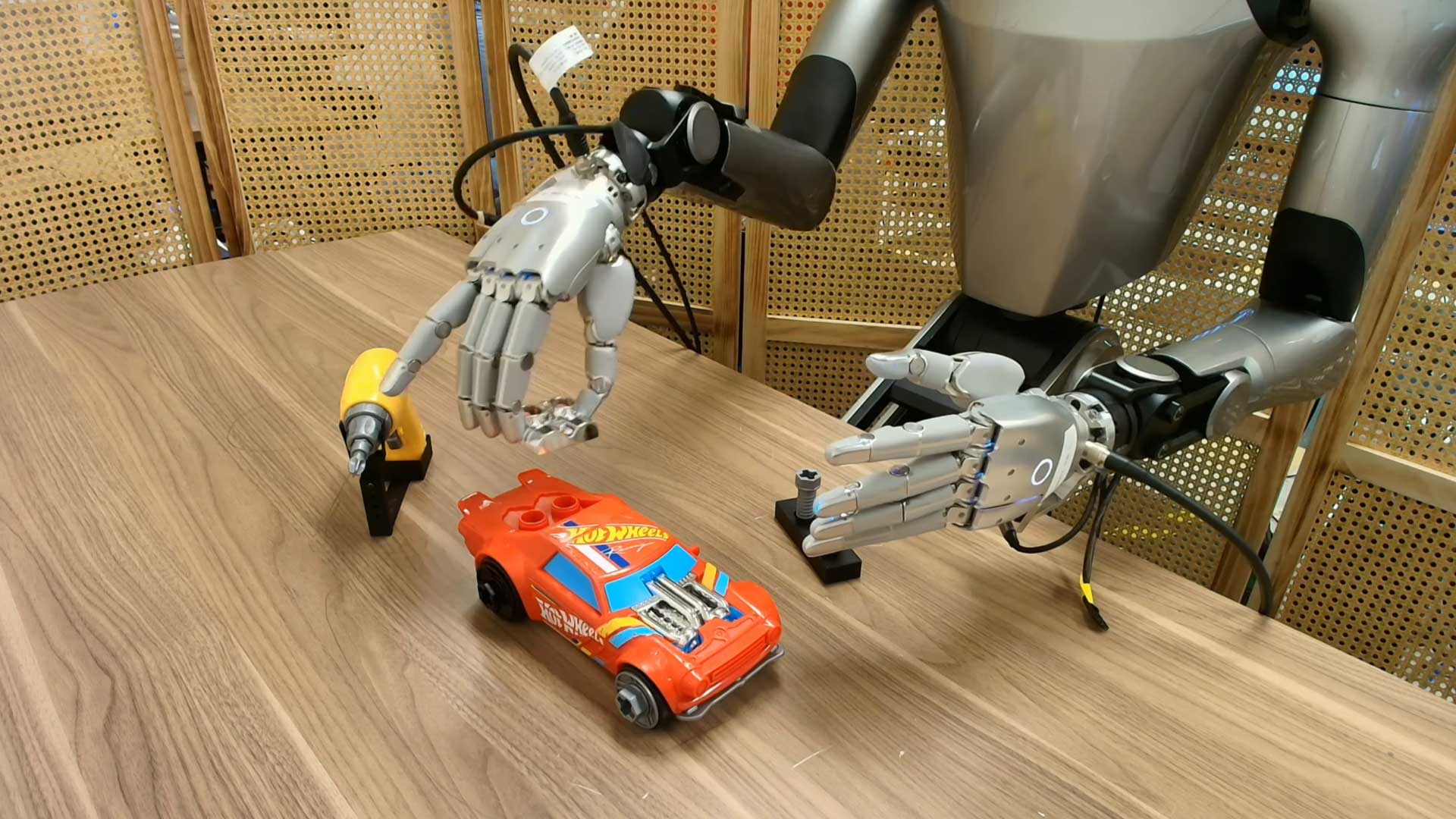
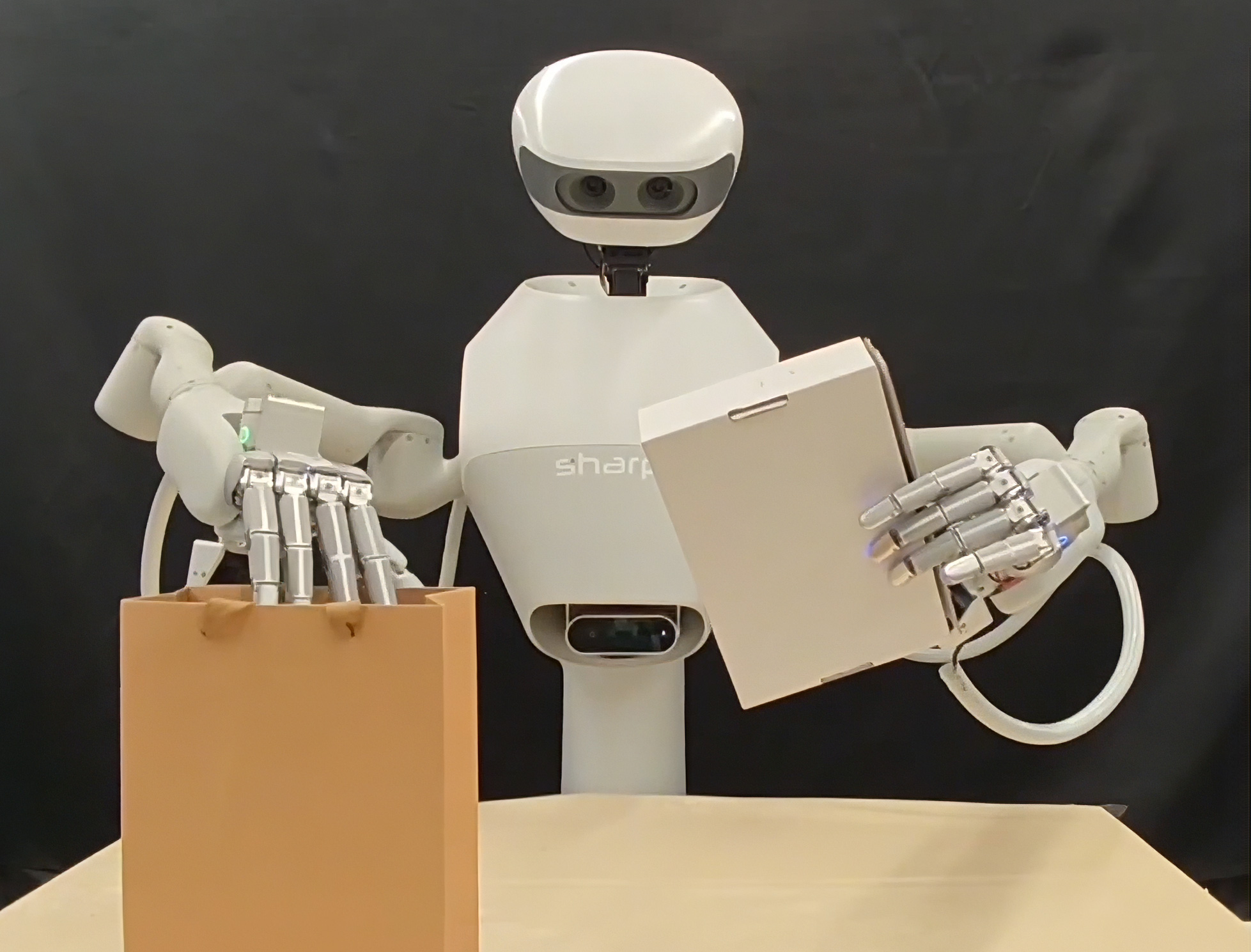
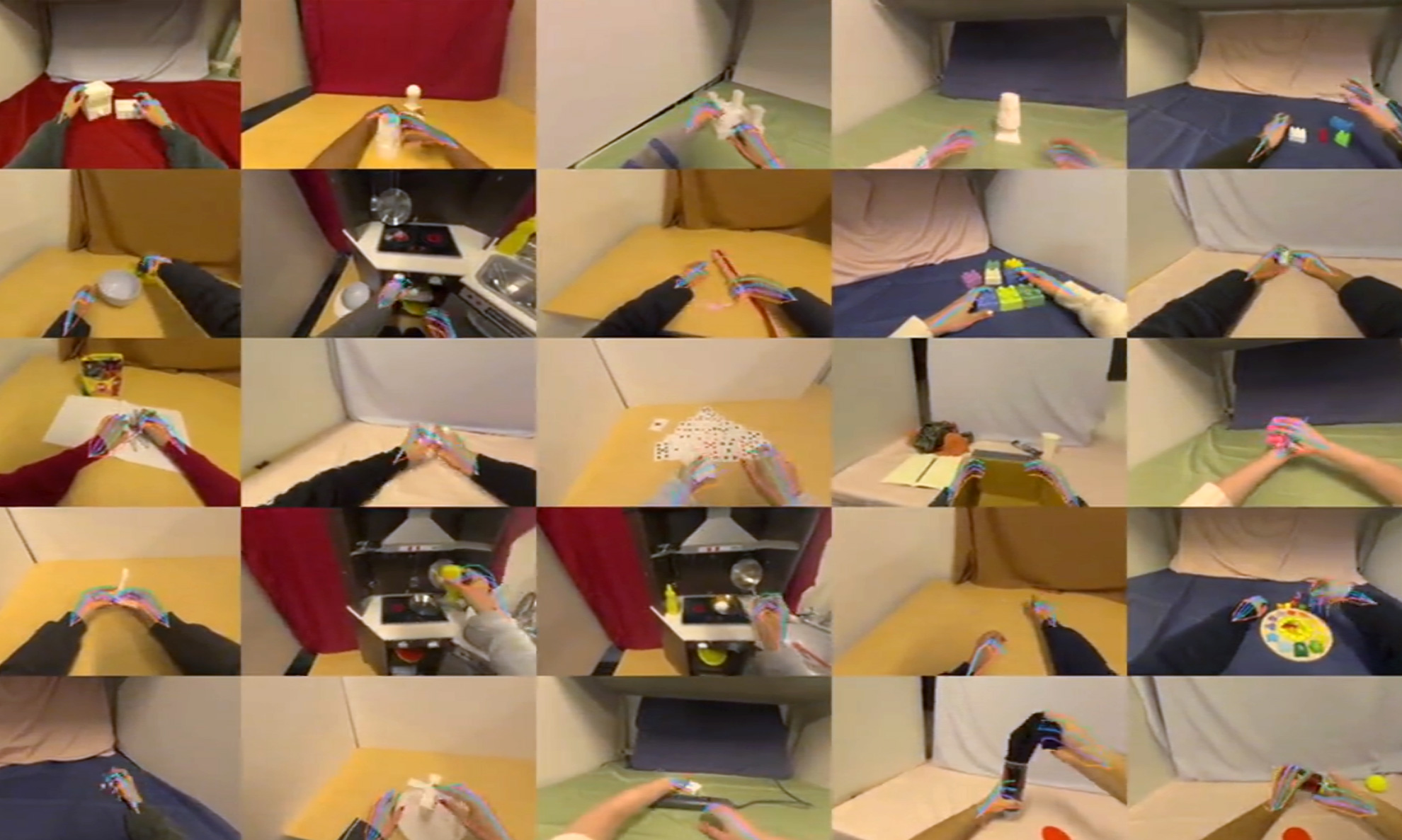
With millimeter-level finger tracking and low-latency data streaming, MANUS gloves give operators full, expressive control over robotic hands in real time, producing precise, high quality training data for robot learning. When paired with the Metagloves Pro Haptic, contact sensations return to the operator the moment they occur, for complete physical awareness of every interaction.
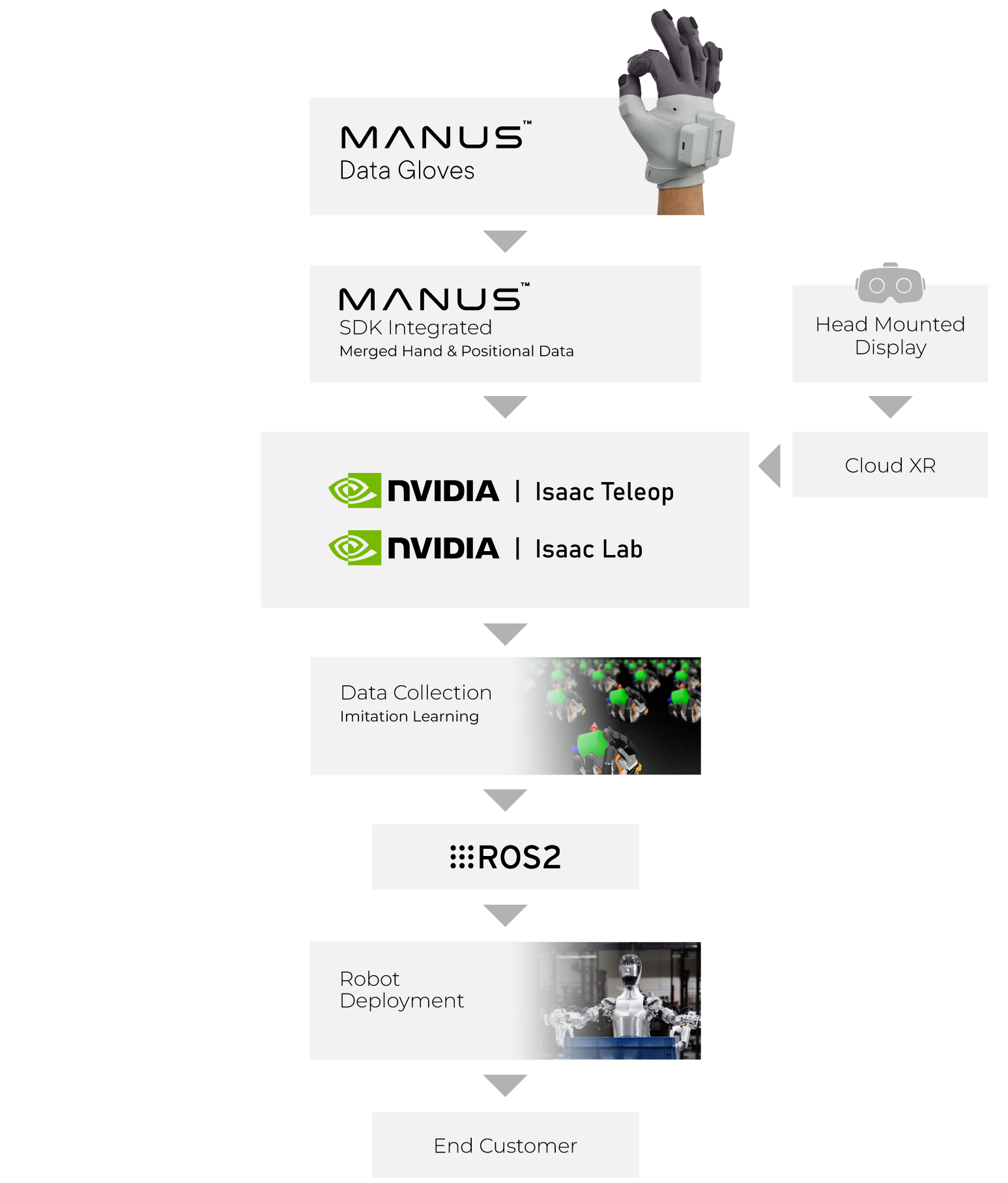
Powered by the MANUS Core SDK with C++ and ROS2 support, MANUS teleoperation gloves are compatible with the leading robotic hand platforms used in dexterous manipulation research.

MANUS gloves are officially supported in NVIDIA Isaac Lab via dedicated plugin, enabling high-fidelity dexterous manipulation demonstrations collected entirely in simulation. The pipeline reduces dependence on physical robots while preserving the policy quality that transfers to real robots.