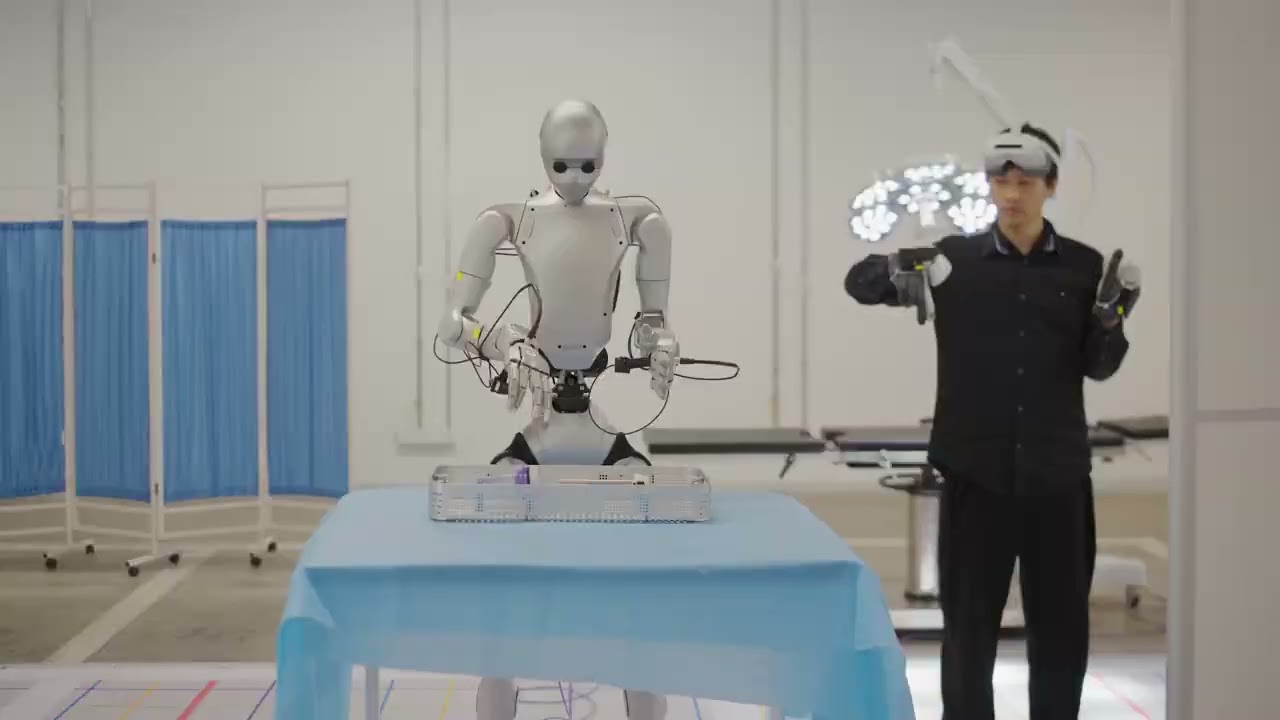
At GTC Taipei 2026, NVIDIA announced Isaac GR00T Reference Humanoid Robot, the first open humanoid reference design built on NVIDIA Jetson Thor and the Isaac GR00T platform. The reference design pairs a Unitree H2 humanoid robot with dual Sharpa Wave five-finger hands, NVIDIA Jetson Thor onboard compute, and the Isaac GR00T software stack. MANUS gloves sit within the same Isaac GR00T platform as an officially supported Isaac Teleop input device, providing the high-fidelity finger tracking used to capture demonstrations for robot learning.
The NVIDIA Isaac ecosystem addresses a core challenge in robot learning: generating the demonstration data that manipulation policies require. Isaac Teleop provides a framework for capturing human motion and retargeting it into robot actions across both simulation and physical systems. Isaac Lab uses those demonstrations for imitation learning, policy development, and large-scale training workflows.
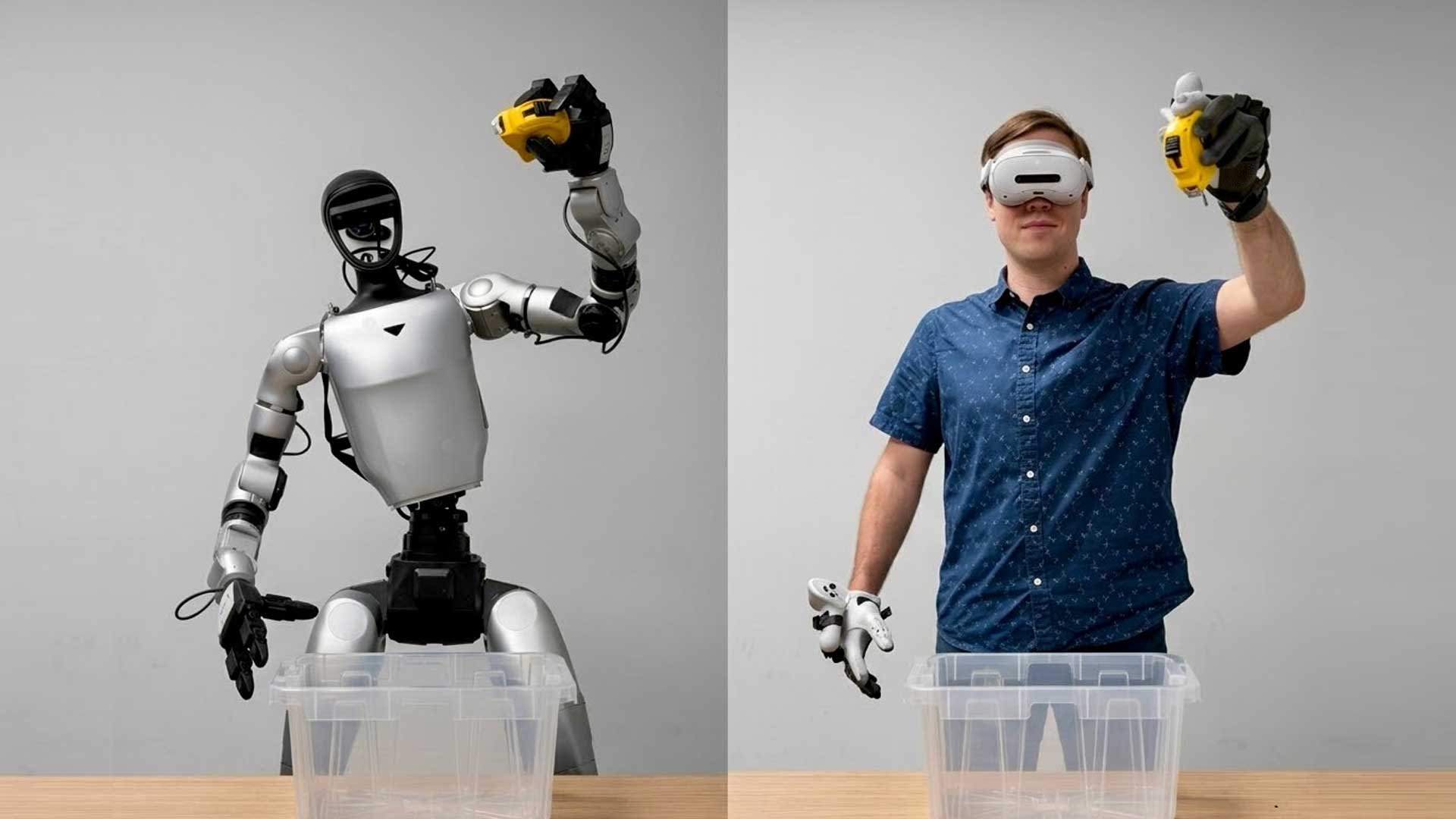
MANUS gloves function as a high-fidelity input device within this pipeline, tracking hand motion in real time. In Isaac Teleop, hand motion is streamed in real time through the MANUS Gloves Plugin and processed by the retargeting pipeline to generate robot commands. These recordings feed into Isaac Lab for learning from demonstrations, synthetic data generation, and robot policy development.
Together, these components form a continuous pipeline connecting human demonstration, simulation, and policy learning, enabling large-scale training that compensates for the limitations of manual data collection.
One practical consequence of the dual integration is that the same MANUS gloves can be used across both simulation and physical deployments. Operators working in Isaac Lab can transition to real-world teleoperation without changing their input setup, reducing discrepancies between simulated and real-world data collection and supporting more consistent sim-to-real workflows.
Within the broader Isaac GR00T platform, demonstration data sits at the top of NVIDIA's data pyramid: the highest-fidelity signal for grounding robot policies in real physical capability. The MANUS integration supports that layer of the pipeline across both environments where the Isaac ecosystem operates.